

为何看自动辅助驾驶靠不靠谱,你得观察这玩意儿?
汽车出行 2022-06-26 创始人
过往,你可能听过激光大灯,如今激光一技术同样也运用在了自动辅助驾驶上,也就是激光雷达。原理上,如今智能电动汽车上搭载的激光雷达,多为LiDAR(Light Detection And Ranging)它包括一个单束窄带激光器和一个接收系统。激光器产生并发射一束光脉冲,打在物体上并反射回来,最终被接收器所接收。接收器通过测量光脉冲从发射到被反射回的传播时间,计算出车辆与反射物之间的距离。
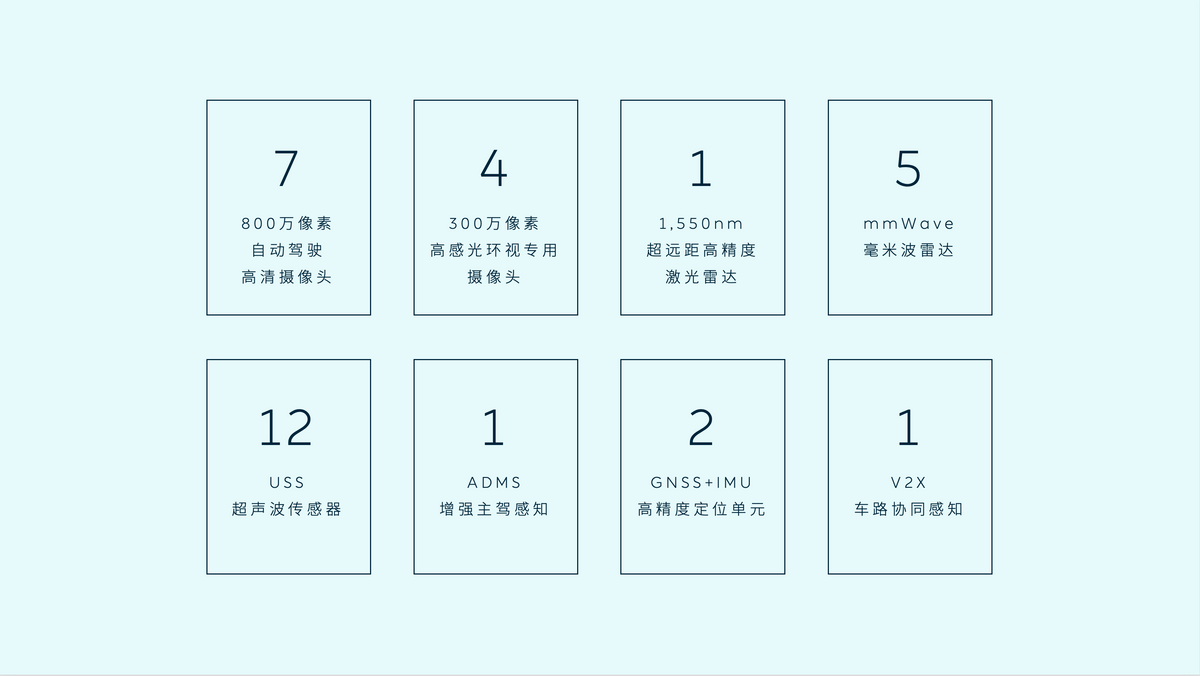
一如蔚来电动轿车ET7,就大量了使用该项技术,ET7搭载了Aquila蔚来超感系统,配备33个高性能感知硬件,其中包括1个超远距高精度激光雷达,7个800万像素高清摄像头、4个300万像素高感光环视专用摄像头、1个增强主驾感知、5个毫米波雷达、12个超声波传感器、2个高精度定位单元和V2X车路协同。实现融合感知,定义了量产车自动驾驶感知系统的全新标准。
而蔚来ET7搭载了来自Innovusion的超远距高精度激光雷达,最远探测距离达500米,10%反射率下探测距离达250米,拥有120°超广水平视角和0.06°*0.06°超高分辨率,是全球首款实现大规模量产的1550nm激光雷达。而1550nm激光拥则有比 905nm更好的人眼安全性。
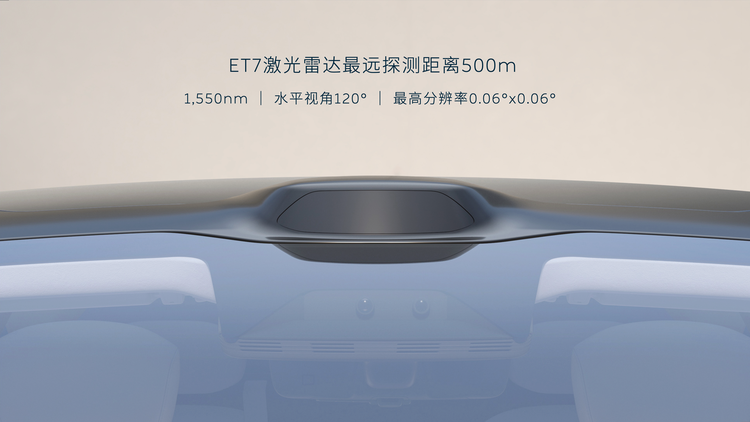
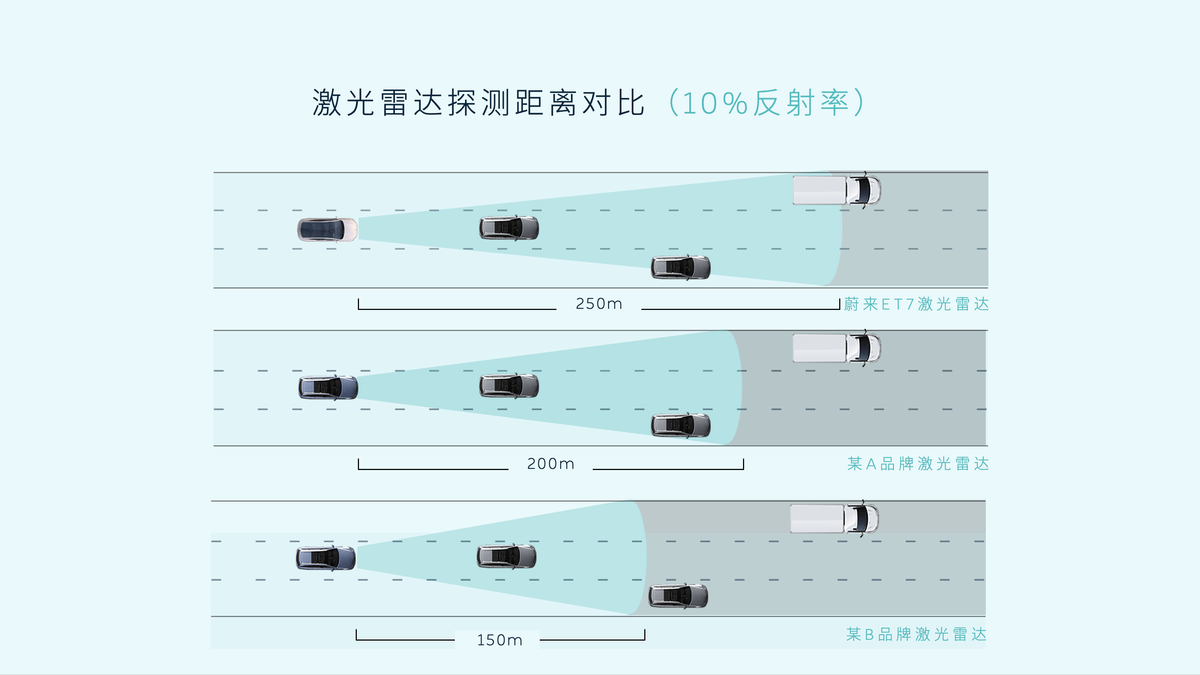
蔚来ET7激光雷达最远探测距离可达500米,10%反射率标准下的探测距离,可达250米,行业领先。
如今自动辅助驾驶功能,包括领航辅助功能,更多被应用于高速公路及城市快速路等路段。随着车速的提高,远距离探测已成为确保自动辅助驾驶安全性的必要能力。
新的《道路交通安全违法行为记分管理办法》,在2022年4月1日正式实行,其中有一条新规引起广泛关注,即在高速或者城市快速路上,超速20%以内不扣分。因此,在车流密度允许的情况下,部分高速公路将出现车速达140km/h的车辆。
更快的车速要求车辆具备更远的探测距离:当前方出现危险物体,车辆需要紧急刹停时,车速越高需要的刹停距离越长。因此更长的探测距离,有助于在高速行驶时,更早地发现险情,更早地采取制动,避免事故伤害。
图像级激光雷达
每0.01°的角分辨率变化,在200m处,相邻的两个点距离约在3.5cm。以0.1°角分辨率的激光雷达为例,其接收到的相邻两点间隔35cm,对于行人、自行车、摩托车这样的目标物体,点云过于稀疏,对于算法挑战极大。
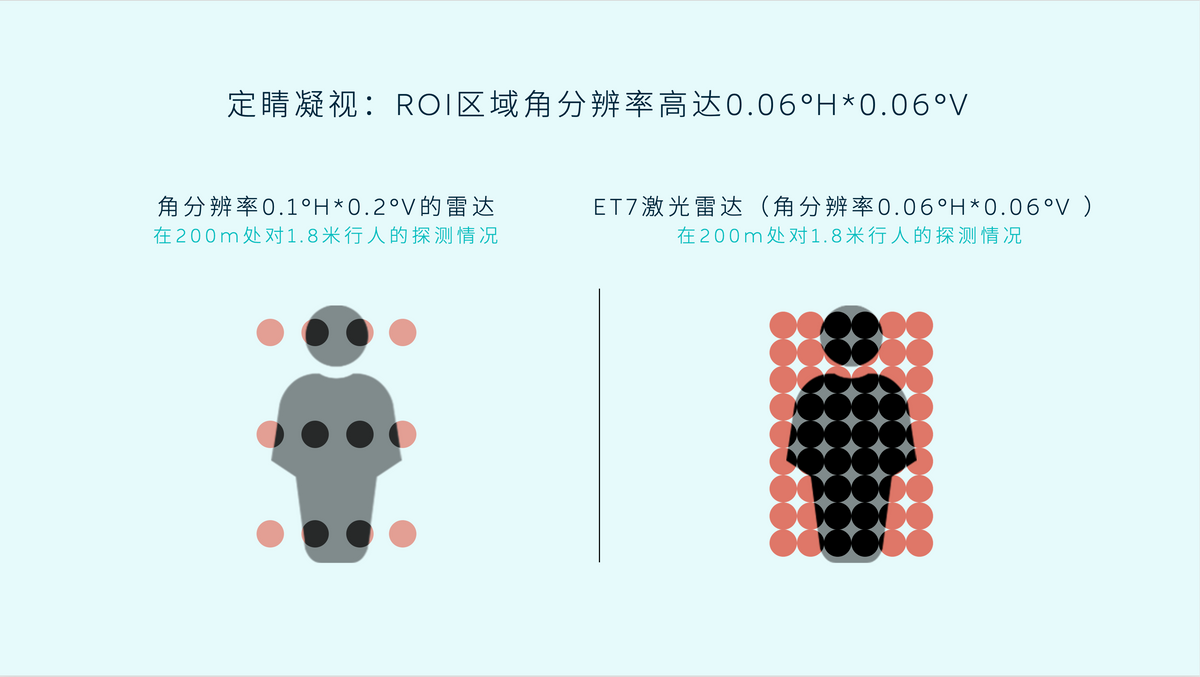
ET7激光雷达定睛凝视区域策略性选择加密关键区域,而非全局铺满点,可根据需要随时让任意区域分辨率高起来。避免占用不必要的计算资源,增加功耗、带宽等,提升数据利用的有效性,减轻算法压力,更利于整车感知系统运行,真正实现“把“点”用在刀刃上”。
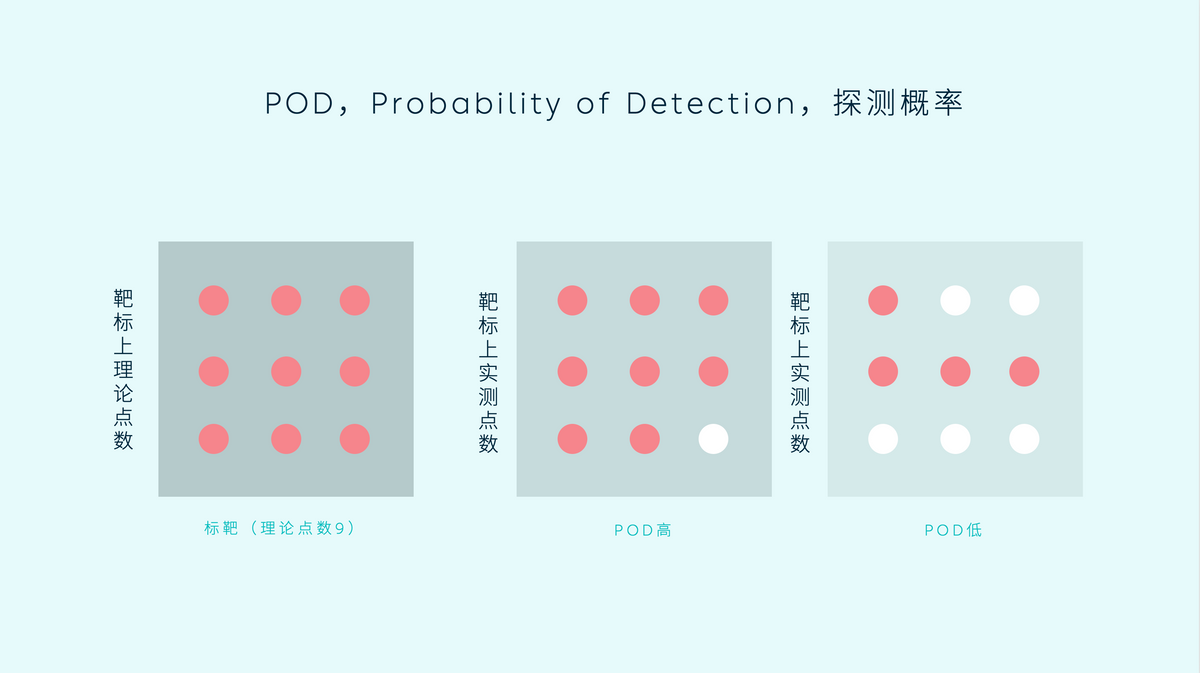
与此同时,POD为探测概率Probability of Dectection,一般为超过连续100帧发射的激光束数量(即理论点数量)与被探测到的激光束数量(即有效点数量)的比值。POD体现出激光雷达接收返回点数的能力和稳定性,是反应激光雷达性能的一项重要指标。
蔚来搭载的激光雷达具有优秀的探测能力,感知250m处10%反射率物体的探测概率超过90%,行业领先。更高的POD,可以让车辆更清晰明确地感知到目标物体,减轻算法压力,实现更远的有效感知距离,提升自动驾驶系统整体的安全性。
写在文后:
在业内没有统一标准的前提下,蔚来联合图达通共同制定针对ET7激光雷达可靠性标准,设计了DVPV实验的架设环境、检测条目、性能及实验要求。 而随着激光雷达的技术之普及,势必对于接下来自动辅助驾驶的普及将更为加速,也将颠覆汽车在历史长流下,我们所接触的汽车将有所改变。

The End
免责声明:本文内容来源于第三方或整理自互联网,本站仅提供展示,不拥有所有权,不代表本站观点立场,也不构成任何其他建议,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容,不承担相关法律责任。如发现本站文章、图片等内容有涉及版权/违法违规或其他不适合的内容, 请及时联系我们进行处理。
-
分类导航
-
-
最新文章
-
本栏文章
-
随机文章
-
友情链接
